
Yamcs Enterprise
Dual-License Model
Yamcs is distributed using a dual-license model. Organizations can use Yamcs under the AGPL open-source license, or obtain a commercial license agreement from Space Applications Services.
The open-source license allows free usage and contributions from the community. Organizations that require proprietary integrations, professional support, or additional enterprise modules can obtain a commercial license agreement.
Open Source (AGPL)
- Free and open-source software
- Full access to the Yamcs source code
- Community support via forums and GitHub
AGPL Obligations
- Modifications to Yamcs must be released under the AGPL license
- If Yamcs is deployed as part of a network service, source code changes must be made available
- No guaranteed support response time
Commercial License Agreement
- No obligation to disclose proprietary source code
- Right to build and distribute proprietary applications based on Yamcs
- Access to professional technical support
- Collaboration with the Yamcs development team
- Access to additional enterprise modules
The dual-license approach enables a strong open-source ecosystem while allowing organizations to deploy Yamcs commercially with professional support, maintenance, and enterprise capabilities.
Licensing Options
| Yamcs Core | Additional Modules | Technical Support | Software Updates | Managed Service | Cost | |
|---|---|---|---|---|---|---|
| Open Source (AGPL) | ✔ | — | — | — | — | Free |
| License Agreement per device |
✔ | ✔ | ✔ | ✔ | — | Annual fee per device |
| License Agreement per project |
✔ | ✔ | ✔ | ✔ | — | Annual project license |
| Technical Support & New Features | ✔ | ✔ | ✔ | ✔ | — | Time & Material or Fixed-Price Quote |
| Software as a Service (SaaS) | ✔ | ✔ | ✔ | ✔ | ✔ | Subscription-based quote |
Additional Modules
Yamcs Enterprise extends the open-source Yamcs core with additional modules that support automation, connectivity with external systems, security enhancements, and enterprise deployment capabilities.
- Automation: Yamcs-SPELL, TYNA
- Connectivity: ROS2, MIL-STD-1553, SpaceWire
- Security: FIPS-certified encryption
- Distribution: Package repositories for Debian, Ubuntu and RHEL, plus Kubernetes Helm charts
Automation
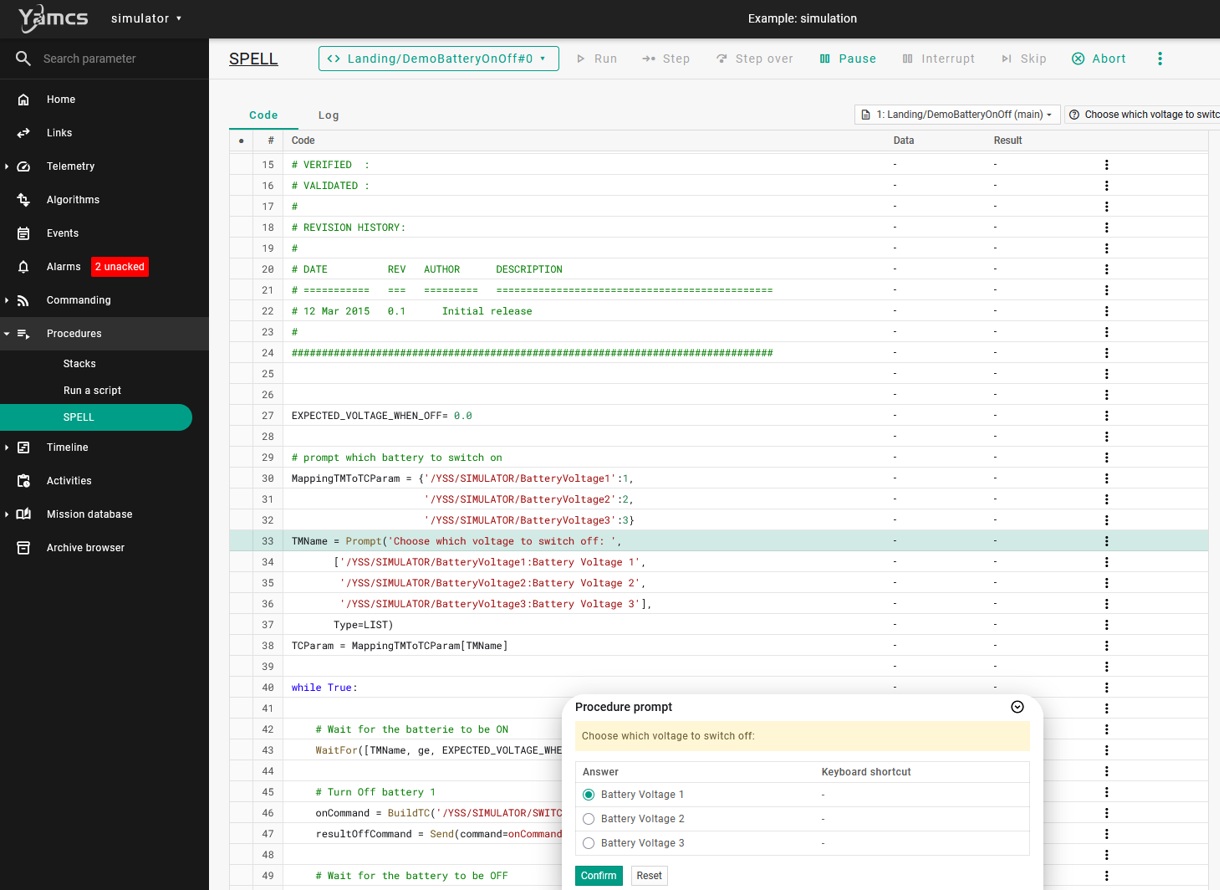
Yamcs-SPELL
Yamcs-SPELL enables operators to automate spacecraft operations using scripted procedures. Operational scripts can execute complex command sequences and automate mission workflows.
- Scripted operational procedures
- Command stack execution
- Procedure testing and validation
- Integration with mission timelines
- Manual or automated triggering
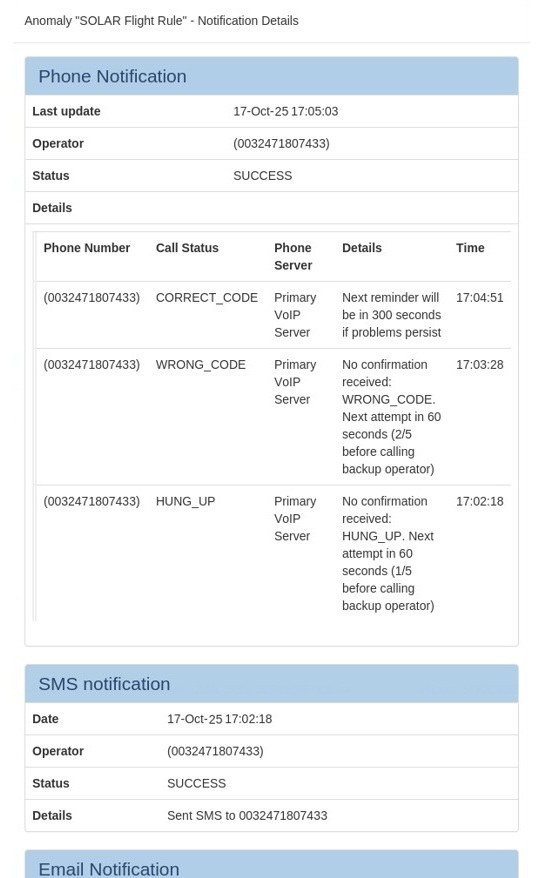
TYNA — Notification System
TYNA monitors telemetry streams and operational events and alerts operators when anomalies or predefined conditions occur.
- Automated anomaly notifications
- Telemetry-based alerts
- Operator notification management
- Email, SMS and phone notifications
Connectivity
Connectivity modules allow Yamcs to interface with spacecraft subsystems, robotics platforms, and avionics communication buses.

ROS2 Integration
The Yamcs ROS bridge connects Yamcs with systems using the Robot Operating System (ROS). Telemetry and commands can be exchanged between robotics platforms and Yamcs.
- Mapping of ROS topics to telemetry
- Command forwarding to ROS services
- Support for robotics simulations
- Integration with robotic systems

MIL-STD-1553
Support for the MIL-STD-1553 avionics bus enables Yamcs to interact with spacecraft subsystems using this widely adopted aerospace protocol.
- Interface with avionics subsystems
- Support for spacecraft testing
- Reliable command and telemetry exchange

SpaceWire
SpaceWire connectivity allows Yamcs to interface with high-speed spacecraft onboard data networks used for payload and platform communication.
- High-speed telemetry transfer
- Payload network integration
- Support for ground testing
Security

CCSDS SDLS - FIPS-Certified Encryption
Yamcs supports CCSDS SDLS encryption for telemetry and command links using AES-GCM-256 algorithms. Enterprise deployments can use FIPS-certified cryptographic providers.
- Plugin for Yamcs CCSDS SDLS
- FIPS-certified crypto provider (FIPS 140-3)
- AES-GCM-256 encryption
- Secure telemetry channels
- Secure command distribution

CCSDS SDLS - CYSEC Arca Satlink
ARCA SATLINK is the CYSEC implementation of the Space Data Link Security (SDLS) protocol. This module provides a Yamcs validated ground implementation for the CYSEC Arca Satlink.
- Yamcs CCSDS SDLS
- Compatibility with the flight CYSEC Arca Satlink
- AES-GCM-256 encryption
- Secure telemetry channels
- Secure command distribution
Distribution & Deployment
Enterprise Distribution Packages
Enterprise package repositories simplify installation and lifecycle management of Yamcs across operational infrastructures.
- Debian and Ubuntu packages
- RHEL distribution packages
- Simplified installation and updates
Kubernetes Deployment
Helm charts allow Yamcs to be deployed in scalable cloud environments using Kubernetes infrastructure.
- Helm chart deployments
- Cloud-native operations
- High-availability architectures
- Support for satellite constellations